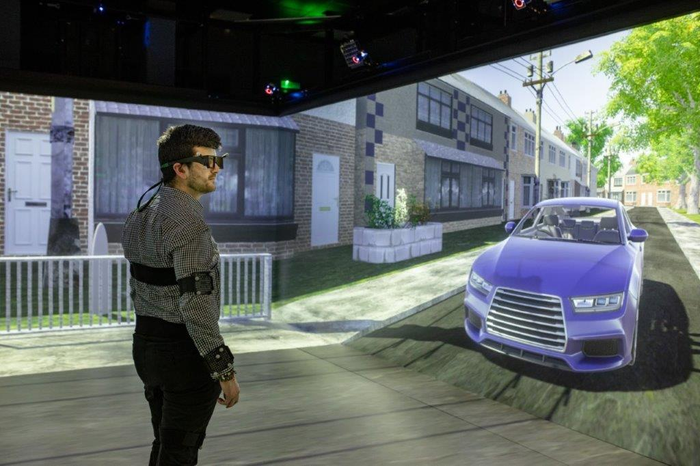
Untuk mengkaji hal model para ilmuwan ini, para tim menggunakan realitas maya (realitas virtual) atau disingkat VR, dengan menempatkan peserta uji coba dalam skenario penyeberangan jalan di University of Leeds’ dengan menggunakan ruang HIKER (Highly Immersive Kinematic Experimental Research) pedestrian simulator.
Pada gerakan peserta terlacak dengan sangat detail saat berjalan bebas, ini terlihat pada adegan virtual 3D stereoskopik. Pada virtual maya itu terlihat jalan raya dengan kendaraan yang tengah melaju, lalu masing-masing para peserta diminta untuk menyeberang jalan saat merasa aman untuk menyeberang.
Kemudian melakukan pengujian yang berbeda lagi, dimana kendaraan dengan komposisi mempertahankan kecepatan yang sama untuk membiarkan pejalan kaki menyeberang. Selain itu mencoba dengan menyalakan lampu dim untuk mewakili sinyal.
Alhasil, para peneliti menemukan kesimpulan bahwa para peserta berperilaku seolah-olah dapat memutuskan kapan harus menyeberang saat kendaraan melaju di jalan raya, melihat waktu. Ini pun terekam pada data sensori jarak kendaraan, kecepatan, akselerasi, serta isyarat komunikatif.
"Berarti bahwa model difusi drift mereka dapat memprediksi jika, dan kapan, pejalan kaki kemungkinan akan mulai menyeberang jalan," terang Profesor Gustav Markkula.
Profesor Markkula mengatakan, temuan ini dapat membantu memberikan pemahaman yang lebih baik tentang perilaku manusia dalam lalu lintas.Hanya saja membutuhkan upaya meningkatkan keselamatan berlalu lintas, serta perlu pengembangan kendaraan otomatis yang ramah terhadap manusia atau pejalan kaki.
Menurut Profesor Gustav Markkula, interaksi yang aman dan dapat diterima pengendara dengan pejalan kaki merupakan tantangan utama bagi pengembang kendaraan otomatis. Pemahaman yang lebih baik tentang bagaimana pejalan kaki berperilaku akan menjadi kunci untuk memungkinkan hal ini.
"Memprediksi keputusan pejalan kaki dan ketidakpastian dapat digunakan untuk mengoptimalkan kapan, dan bagaimana, kendaraan harus melambat dan memberi sinyal untuk menyampaikan bahwa aman untuk menyeberang, menghemat waktu dan tenaga untuk keduanya," ujar penulis utama Dr Jami Pekkanen, saat melakukan penelitian itu di University of Leeds. (*)
Disclaimer: Halonusa tidak bertanggung jawab atas keakuratan rilis berita yang diposting ke Halonusa! oleh lembaga yang berkontribusi atau untuk penggunaan informasi apa pun melalui sistem Halonusa.Editor : Redaksi